З°СФЦЪЛщЦЬЦӘHoudiniКЗТ»ҝоәЬЗҝә·өД3DИнјюЈ¬ФЪәЬ¶аУ°КУҙуЖ¬Ап¶јДЬјыөҪЛьөДЙнУ°ЎЈ№Щ·ҪSideFX°СЛь¶ЁО»ФЪ3D Procedural Software for Film,TV,&GamedevЈ¬ЖдКөHoudiniЧФјәөДіМРтҪЪөгБчУлЦЪ¶ајҜіЙөДCV№ҰДЬФзТСі¬іцБЛөзУ°ЎўөзКУЎўУОП·БмУт·¶ілЈ¬ҫНИзUE4Т»СщТІІ»Ц»ҪцЦ»КЗТ»ҝоУОП·ЦЖЧц¶«ОчЎЈХвТ»өг№Щ·ҪSideFXТСҫӯИПК¶өҪБЛЈ¬ө«КЗПкПёКІГҙФӯТтГ»УР№ы¶ПЧӘРНҪъј¶Ј¬ОТГЗТІІ»ЗеіюЎЈҫНёцИЛІ»СЕ№ЫөгАҙҝҙЈ¬јЩИзSideFXФЩІ»НШХ№БмУтЈ¬ҝӘ·ЕҝӘФҙөД»°Ј¬әЬҝЙДЬ»бұ»UE5ЎўBlenderТФЦБNukeөИИнјю°СБчГҪМеЎўҝЖСРҪМУэЎўAIөИРВРЛКРіЎёш№П·ЦөфЈ¬ҙУ¶шИГұҫИЛі№өЧіБДзіцҙнОӘТ»ёцІејю№«ЛҫЎЈ ЖдКөҙУHoudini17.5іхІҪ,PDGөДTopБчТФј°CSVәНPython3өДёсКҪҝӘ·ЕЈ¬ЛСВЮЧоҪь18.5¶ФКөКұ¶ҜІ№өД¶ҰБҰіЕіЦЈ¬ХвР©ҝҙЛЖ¶Фҙ«НіМШР§ЦЖЧцГ»КІГҙҙуМбЙэөД№ҰДЬЈ¬ЖдКөКЗHoudini¶ФРВРНКРіЎөДІвСйҝјКФУлёъҪшЈ¬ТІКЗИзҪсөДҝӘХ№ЗчКЖЎЈ¶ФОТёцИЛ¶шСФЈ¬HoudiniКЗТ»ёцәЬәГөДИэО¬КэҫЭ·ВХжУлЙъіЙ¶«ОчЈ¬¶ФИэО¬КэҫЭІыКцУлҙҰЦГУР·ЗіЈҙуөДРӯЦъЎЈИзҪсұИҪП»рөДCVБмУтЈ¬УРmatplotlibәНOpenCVЈ¬¶јКЗТөҪзІ»іЙОДөДіЯ¶ИЈ¬ЛдИ»БҪХЯ¶јУРИэО¬јЖЛгР§№ыЈ¬ө«КЗЧЁТөҝЙКУ»ҜөДИэО¬КэҫЭИнјюИ«Зт»№Г»Т»ёцҙуөДТ»ІўЎЈөұИ»ТӘіЙОӘХвЦЦИнјюЗ°МбұШРлКЗҝӘФҙҝӘ·ЕөДЈ¬Blender»тХЯUE5ҝЙДЬУРКұ»ъЈ¬HoudiniОТІ»ЦӘөАЎЈ(НВІЫНкұП) ОӘәОҪІҪЪөг·ЦАаУГ№эHoudiniөДЕуУС¶јЦӘөАЈ¬ГҝөұHoudiniҝз0.5өД°жұҫҪъј¶әуЈ¬іЗКРУРНҰҙуөДёД¶ҜЈ¬ҙујТТІҫӯіЈНВІЫHoudiniГҝҙОёьРВәуҫНөГЦШС§Т»ұйЎЈЖдКөHoudiniЧФјәөДЙијЖјЬ№№ҫц¶ЁБЛЛьөДГҝҙОРВ№ҰДЬЗ¶Ил¶јҪ«»бКЗТ»ҙОҙу»»СӘЎЈТтОӘHoudiniЛщУРДЈҝйЦ®јдөДКэҫЭ¶јКЗПаНЁөДЈ¬¶шЗТКЗТФҪЪөгБчөДРОКҪПаБ¬Ј¬ХвҫНәГұИИЛөДҫӯВзЈ¬КэҫЭҫНИзСӘТәТ»°гФЪҙЛЦРУРРтСӯ»·Ј¬өұРВФцТ»По№ҰДЬЈ¬ҙтёцАэИзТӘёшИЛјУЙПТ»¶Фіб°тЈ¬ДгХыёц№ЗчАУлҫӯВз¶јөГҙУН·»»Т»МЧЈ¬№№іЙСӯ»·ПөНіЈ¬ТФ°ь№ЬҙуДФөДСӘТәДЬБчИліб°тЎЈ¶шMaya,MaxөД№ҰДЬЦШТӘТФІејюөДРОКҪАҙФцјУЈ¬ПаөұУЪёшИЛҙ©ТВ·юЈ¬ГҝјУТ»ёц№ҰДЬҫН¶аҙ©Т»јюТВ·юЈ¬ҙ©¶аҙ©ЙЩІ»»бУ°ПмХыёцИЛөДЙнІДЈ¬ЛщТФFumeFXАпөДКэҫЭІ»ДЬјдҪУЧцУГФЪYetiЙПЎЈ HoudiniХвМЧСӯ»·ұХәПөДҫӯВзПөНіЈ¬ЛьөДәГҙҰҫНКЗКэҫЭі©НЁРФЈ¬әҰҙҰТІХэКЗТтОӘЛьКэҫЭТ»Ме»ҜІ»әГЗш·ЦЈ¬ұгАыөјЦВГјГ«әъЧУТ»°СЧҘЈ¬І»ЦӘҙУДД¶ПөҪДДЎЈHoudiniКЗТ»ёцҪЪөгБчИнјюЈ¬ТӘК№УГHoudini·ВХжИэО¬КэҫЭЦ®З°Ј¬ұШРлөГАнҪвЛьөД№ҰДЬДЈҝйУлҪЪөг№№іЙЎЈХвКЗИлГЕHoudiniөДөЪТ»ІҪЈ¬әЬ¶аИЛИПОӘHoudiniДСС§Ј¬ЖдКөөЪТ»ІҪҫНВхҙнБЛұкөДДҝөДЈ¬өјЦВәуГжФҪС§ФҪгВұЖЎЈ HoudiniөДДЈҝйУлҪЪөгАаРНЛөөҪHoudiniөДДЈҝйУРДДёцЈ¬ҪЪөгУРДДёцЈ¬№АјЖУРәЬ¶аИЛ¶јҙрёҙЙПАҙЈ¬ЛСВЮТ»Р©АПКЦЎЈТтОӘЛжЧЕHoudini°жұҫУл№ҰДЬөДҪъј¶Ј¬ЛьЧФјәөДДЈҝйУлҪЪөгАаРНТІФЪ·ўЙъұдёпЈ¬ЛщТФЛьІўІ»КЗФӯ·вІ»¶ҜөДЎЈ Houdini18.5өД№ҰДЬДЈҝй
ЙПНјҫНКЗHoudiniөД№ҰДЬДЈҝйЈ¬ОТ·ўПЦУРәЬ¶аИЛҫӯіЈҪ«ДЈҝй№ҰДЬУлҪЪөгАаРНЎўҪЪөг№ҰДЬ»мФЪТ»ЖрАҙ»®·ЦәНГиКцHoudiniЎЈЖдКөХвКЗІ»ҝЖС§өДЈ¬ТІКЗұИҪП»мВТөДЎЈҫЩёцАэЧУЈ¬SOPКЗёЙКІГҙөДЈ¬ХвёцОКМв№АјЖГҝёцК№УГHoudiniөДИЛіЗКРОКөҪЎЈИ»¶шФЪ№ҰДЬДЈҝйАпОТГЗІўГ»ҝҙјыSOPЈ¬ТФЦБОТГЗ°СHoudiniЛщУРҪЪөгХТТ»ұйЈ¬іэБЛёцҪРSop networkөДөЧЧУҫНГ»ҝҙјыSopЎЈҙУТ»Р©ҪМКҰҝЪЦР»тХЯНшЙПІйС°өГөҪөДҙр°ёНщНщКЗsurface operator,What?НвұнІЩЧц?ДЗХвУЦКЗКІГҙТвЛјЈҝУъјУГЙұОЎЈЛщТФЛөҪцҙУЧЦТе№ҰДЬЙПИҘГиКцHoudiniЈ¬КЗөЧЧУГиКцІ»НЁөДЈ¬ҫНПсУГ"Ві°фРФ"ИҘГиКцЛг·ЁТ»СщЈ¬І»Ц»»бИГИЛҫхөГгВұЖТФЦБ»№ВФҙшТ»ЛҝәГРҰЎЈ ДЗОӘәОЦұ°ЧөДЧЦТеҫНОЮ·ЁГиКцHoudiniёчДЈҝй№ҰДЬДШЈҝХэКЗТтОӘHoudiniөД№ҰДЬФЪТ»ЦұНШХ№Ј¬ПЦУРөД№ҰДЬТСҫӯі¬іцБЛЧоФӯПИөДә¬ТеЎЈsurface operatorКЗHoudiniәЬФзәЬФзЦ®З°өД°жұҫЛщК№УГөД№ҰДЬГиКцЈ¬өұКұөД№ҰДЬ№АјЖТІҫННЈБфФЪ¶ФОпМеөДөЧЧУКфРФЎўНвРОЙПөДТ»Р©ІЩЧцЈ¬УРөгАаЛЖMayaОпМеөДShapeЈ¬өұИ»ХвТІКЗОТөДёцИЛҙ§¶ИЈ¬ҫҝҫ№?Ҫб№ыHoudiniөДДЗР©АП°жұҫОТТІГ»УГ№эЎЈ Houdini№Щ·ҪКЗ°ҙҪЪөгАаРН¶ш·ЗДЈҝйөД·ҪКҪАҙ»®·ЦГиКцөДЎЈФЪРӯЦъКЧТіАпҫНУРЈә №Щ·ҪРӯЦъТіҪЪөг·ЦАа ¶ФХХЙПГжБҪХЕНјЈ¬ДЬ№»·ўПЦХвІ»КЗЦрёц¶ФУҰөД№ШПөЈ¬јҙДЈҝй·ЦАа !=ҪЪөг·ЦАаЎЈө«КЗХ§ҝҙТ»СЫЈ¬БҪХЯГІЛЖУЦУРЦШәПөДҙҰЛщЈ¬ХвТІКЗөЪТ»ёцИГИЛұИҪПГФ»уөДҙҰЛщЎЈ¶шЗТОТГЗ»№КЗІ»ЗеіюSOPКЗёЙКІГҙөДЎЈ Houdini18.5ҪЪөг·ЦАа ЖдКөҙУҪЪөгАаРНЙПИҘС§HoudiniДЗҪ«»бКЗЧоЗбЛЙөД·ҪКҪЈ¬¶шЗТДЬЛжЧЕHoudiniөД№ҰДЬНШХ№¶шҪшРРФцБҝСРҫҝЎЈУИЖд¶ФУЪҝӘ·ўИЛФұАҙЛөЈ¬ДЬёьјСөДАнҪвёчёцДЈҝйЦ®јдөДБӘВзЎЈ»°ЛдИзҙЛЈ¬ө«ФӯАҙДЈҝй·ЦАаУл№Щ·ҪРӯЦъТіөД·ЦАаТСҫӯ№»ИЖБЛЈ¬ИзҪсУЦ¶аБЛТ»Р©Ј¬»бІ»»бёьёҙФУБЛЈҝГ»УРЈ¬әЬјтөҘЎЈОТГЗЦ»РиТӘҙУҪЪөгІгј¶ЙПҫНДЬК¶ұріцҪЪөгАаРНЈ¬HoudiniұҫИЛҫНКЗХвГҙАҙ»®·ЦөДЈ¬¶шЗТГҝЦЦҪЪөгАаРНҙУЖдНвІ»СЕ№ЫЙПҫНУРТ»¶ЁөДМШХчЎЈ ИПЗеHoudiniҪЪөгАаРНФЪЦ®З°Ј¬ОТГЗПИУГТ»ёцРЎҪЕФӯАҙ»сИЎОТГЗЛщСЎФсөДҪЪөгАаРНУлҪЪөгАаРНГыіЖЎЈ import hou sn=hou.selectedNodes() for n in sn: print(n.type(),n.type().name())ёчҪЪөгАаРН№ҰДЬ1.DirectorЧЦГжЙПТвЛјКЗөјСЭЈ¬ЖдКөҫНКЗ¶АТ»өДrootёщҪЪөгhou.node("/"),ФЪёГҪЪөгПВІЕ»бУРch,obj,imgөИ№ҰДЬДЈҝйҪЪөгЎЈёГҪЪөгКЗГ»УРКөМеҪЪөгНвРОөДЈ¬ҙУіМРтҪЗ¶ИАнҪвҫНКЗГҝёц№ӨіМөДҪЪөгёщНҫҫ¶ЎЈ 2.ManagerҙтөгҪЪөгЈ¬ТІҫНКЗёчДЈҝйҪЪөгЈ¬ДЬЛСВЮЖдЛыҪЪөгөДИЭЖчҪЪөг.ёъDirectorТ»СщЈ¬ЛьГЗТІКЗГ»УРПкПёҪЪөгНвРОөДЎЈө«ұИDirectorТӘЦұІ»СЕ№ЫТ»өгөДҙҰЛщҫНКЗЈ¬ДгДЬ№»ИПОӘҪЪөгГж°еАпөДГҝёц·ЦТіҫНКЗЛьГЗЎЈ  HoudiniЦРөДManagerҪЪөгУР: hou.node("/ch")hou.node("/img") hou.node("/mat") hou.node("/obj") hou.node("/out") hou.node("/shop") hou.node("/stage") hou.node("/tasks") 3.ChopКэҫЭНЁөАҪЪөгЈ¬Хл¶ФHoudiniЛщУРКэҫЭНЁөАҙҰЦГөДҪЪөгЈ¬ДЬ№»КөПЦКэҫЭНјРО»ҜЎЈЛщУРchop networkПВөДөЪТ»ІгҪЪөг¶јКЗChopАаРНЎЈЧўТвКЗ "ЛщУР"Ўў"өЪТ»Іг"ЎЈПВГжНј2ЦРЈ¬јҙұгАпГжУРchopnet2,sopnet2ХвР©НшВзИЭЖчЈ¬ө«КЗЛьГЗ¶јКЗChopАаРНЈ¬ҙтУЎХв2ёцҪЪөгөДАаРНУлАаРНГыіЖ,ИзПВЈә <hou.NodeType for Chop chopnet> chopnet #ҪЪөгАаРНОӘChop ҪЪөгАаРНГыіЖОӘchopnet<hou.NodeType for Chop sopnet> sopnet ЛщОҪ"өЪТ»Іг"јҙөұЗ°НшВзІгј¶Ј¬ФЪНј2sopnet1АпГжөДҪЪөгЈ¬ҫНІ»КЗChopҪЪөгАаРНБЛЎЈ  Нј1 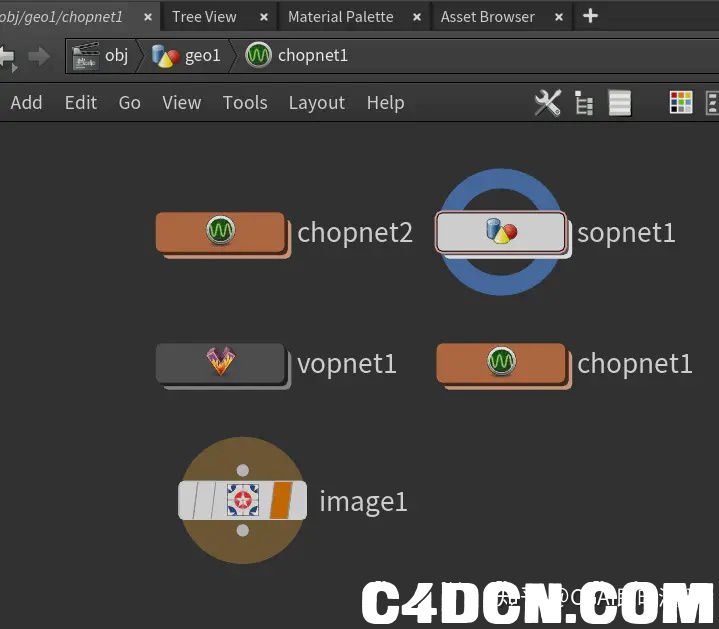 Нј2 <hou.NodeType for Chop chopnet> chopnet<hou.NodeType for Chop sopnet> sopnet <hou.NodeType for Chop vopnet> vopnet <hou.NodeType for Chop chopnet> chopnet <hou.NodeType for Chop image> image 4.ChopNetЛщУРҙшNetҪбОІөДҪЪөгАаРН¶јКЗёГАаҪЪөгөДНшВзИЭЖчҪЪөгЎЈЛщОҪНшВзИЭЖчҪЪөгЈ¬ҫНКЗДЬ№»ЛСВЮәЬ¶аЖдЛыҪЪөгөДҪЪөгЈ¬ЗТёГИЭЖчАпҙҙҪЁөДЛщУРҪЪөг¶јКЗН¬Т»АаҪЪөгЎЈХвАпөДChopNetҫНКЗФЪ/chПВҙҙҪЁөДChop networkНшВзИЭЖчҪЪөгЈ¬УРЗТҪцУРХвГҙТ»ёцЎЈ  <hou.NodeType for ChopNet ch> 5.Cop2әПіЙАаҪЪөгЈ¬HoudiniХл¶ФНјПсәПіЙҙҰЦГөДҪЪөгЈ¬№ҰДЬАаЛЖNukeЎЈө«·ІImg networkНшВзИЭЖчҪЪөгПВҙҙҪЁөДҪЪөгЈ¬¶јКЗCop2ҪЪөгЎЈәПіЙҪЪөгәЬәГұжК¶Ј¬Т»°г¶јҙшЛхВФНјөДЎЈ  <hou.NodeType for Cop2 file> file <hou.NodeType for Cop2 color> color 6.CopNetФЪ/imgПВҙҙҪЁөДImg networkНшВзИЭЖчҪЪөгЈ¬ҪцХвГҙТ»ёцЎЈ  <hou.NodeType for CopNet img> img 7.ObjectОпМеҪЪөгЈ¬ФЪ/objПВҙҙҪЁөДЛщУРҪЪөгТФј°Object networkНшВзИЭЖчҪЪөгАпҙҙҪЁөДҪЪөг¶јКЗObjectҪЪөгАаРНЈ¬ПВНј¶јКЗObjectҪЪөгЎЈЧўТвObject networkНшВзИЭЖчҪЪөгЧФјәөДАаРНФтИЎҫцУЪЛьөДёёҪЪөгЎЈ 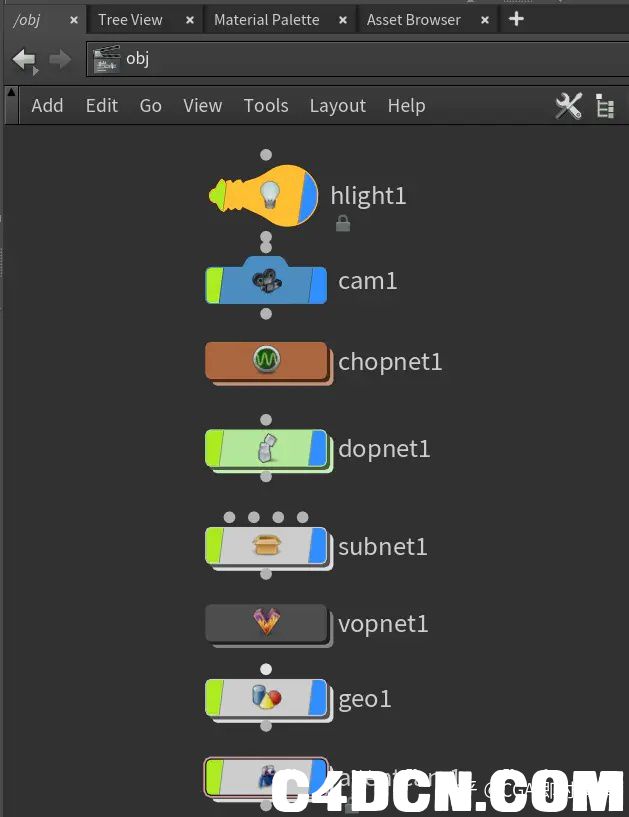 <hou.NodeType for Object dopnet> dopnet <hou.NodeType for Object subnet> subnet <hou.NodeType for Object chopnet> chopnet <hou.NodeType for Object vopnet> vopnet <hou.NodeType for Object cam> cam <hou.NodeType for Object geo> geo <hou.NodeType for Object hlight::2.0> hlight::2.0 <hou.NodeType for Object agentcam> agentcam 8.SopЦХУЪАҙБЛSopЎЈObjectҪЪөгАпіэИҘЛщУРКЗnetworkНшВзИЭЖчөДөЪТ»ІгҪЪөгЈ¬¶јКЗSopҪЪөгЈ¬ТтОӘnetworkНшВзИЭЖчҪЪөгАпҙҙҪЁөД¶јКЗЛьЧФјә№ІН¬АаРН¶ш·ЗSopАаРНЈ¬ЛщТФТӘіэИҘЎЈХвТІКЗ№Щ·Ҫ¶ФSopөД¶ЁТеЈ¬ЛдИ»РӯЦъОДөөЙПөДГиКцТІІ»И«ГжЈ¬ө«ХвКЗ¶АТ»ХэИ·ГиКцSopөД·ҪКҪЎЈТтОӘSopҪЪөгәН№ҰДЬМ«¶аЈ¬УИЖдHoudini17.5№эәуЈ¬SopөД№ҰДЬҪзПЯФҪАҙФҪДЈәэЈ¬әГұИТ»Р©SopҪЪөгЧФјә»бҙшУР¶ҜБҰС§ҪвЛгЈ¬ЛщТФКЗОЮ·ЁҙУҪЪөг№ҰДЬЙПИҘГиКц»®·ЦЛьөДЈ¬¶шЛщУРДЈҝйҪЪөгјҙManagerҪЪөгАпҙҙҪЁөДТІІ»КЗSopҪЪөгЈ¬ЛщТФТІІ»ДЬҙУДЈҝйЙПИҘГиКцЛьЈ¬Ц»ДЬТФҪЪөгАаРНИҘГиКцЎЈ 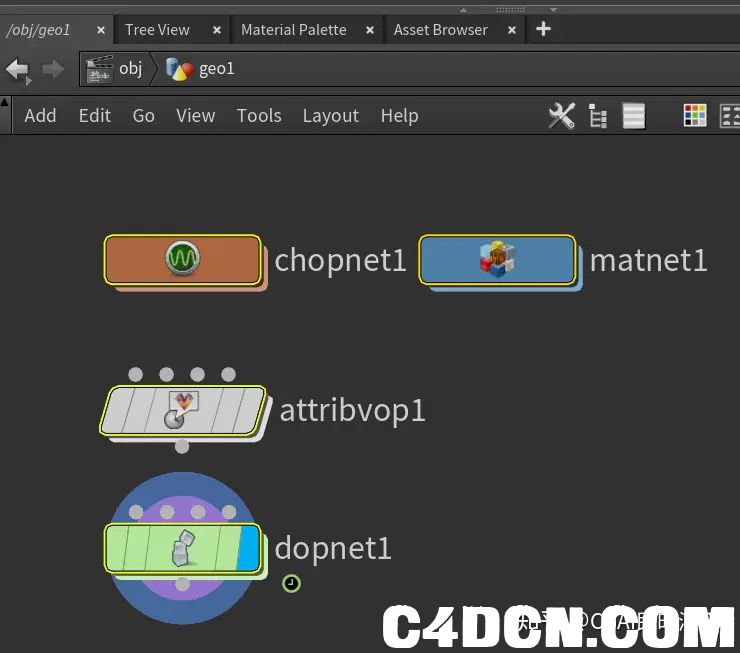 <hou.NodeType for Sop chopnet> chopnet <hou.SopNodeType for Sop attribvop> attribvop <hou.SopNodeType for Sop dopnet> dopnet <hou.NodeType for Sop matnet> matnet 9.Dop¶ҜБҰС§ҪЪөгЈ¬HoudiniЧЁГЕҙҰЦГ¶ҜБҰС§ҪвЛгөДҪЪөгЎЈЛщУРDop networkНшВзИЭЖчҪЪөгАпөДөЪТ»ІгҪЪөг¶јКЗDopҪЪөгЎЈ 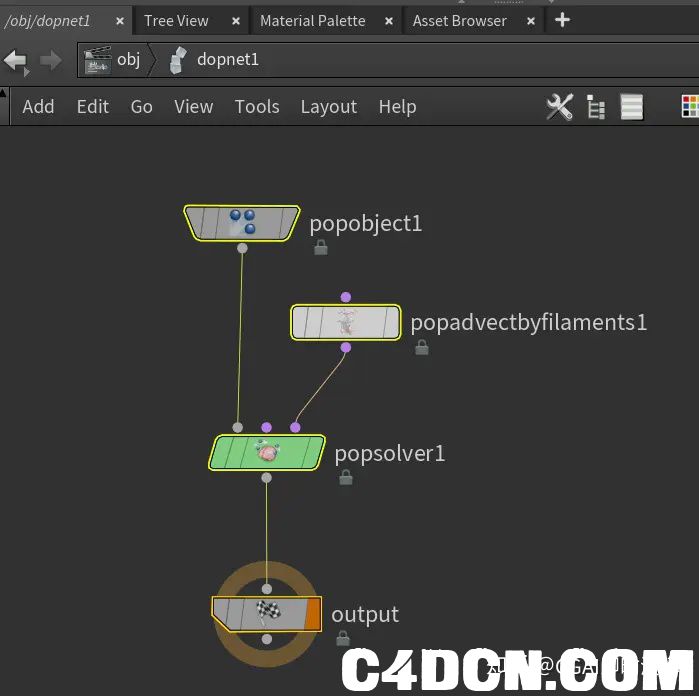 <hou.NodeType for Dop popobject> popobject <hou.NodeType for Dop popadvectbyfilaments> popadvectbyfilaments <hou.NodeType for Dop popsolver::2.0> popsolver::2.0 <hou.NodeType for Dop output> output 10.DriverдЦИҫЎўКдіцҪЪөгЎЈХвёцЖдКөҫНКЗ№Щ·ҪРӯЦъТіЙПЛөөДROPҪЪөг,ТФЗ°ҝЙДЬЦ»КЗОӘБЛдЦИҫRenderЛщТФҪРROP,Ждҙ«ЙсҪЪөгАаРНГыіЖҪРDriver,ДЬ№»АнҪвОӘЗэ¶ҜіМРтЈ¬ҫНКЗҙшёҙФУјЖЛг№эіМөДҪЪөгЎЈІ»ДСАнҪвЈ¬ТтОӘHoudiniИзҪсөДФЛЛгУлКдіцТСҫӯІ»Ц»ҪцКЗдЦИҫөДДЪИЭБЛЈ¬әГұИCSV»№УРЖдЛыUSDёсКҪөДКдіцЈ¬өИөИХвР©¶јі¬іцБЛдЦИҫ·¶ілЈ¬ЛщТФУГDriverёьәПАнЎЈЛщУР/outТФј°Rop networkНшВзИЭЖчҪЪөгПВҙҙҪЁөДөЪТ»ІгҪЪөг¶јКЗDriverҪЪөгЎЈ 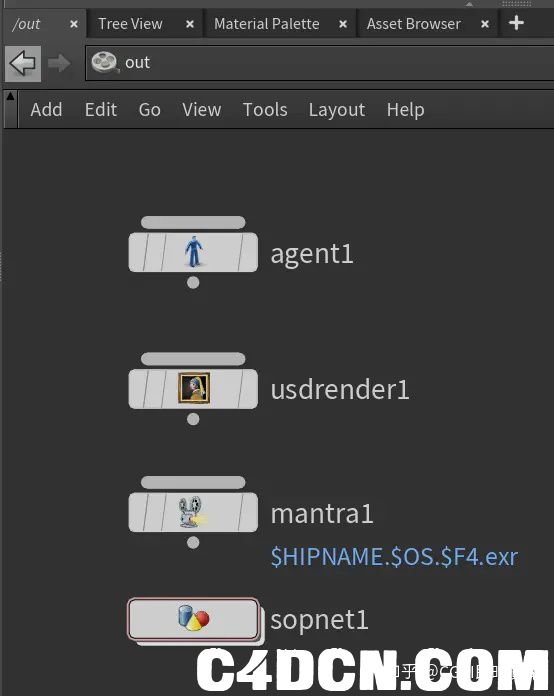 <hou.NodeType for Driver agent> agent <hou.NodeType for Driver usdrender> usdrender <hou.NodeType for Driver ifd> ifd <hou.NodeType for Driver sopnet> sopnet 11.LopОӘUSDБчіМІЩЧцөДҪЪөгЎЈЛщУР/stageУлLOP networkНшВзИЭЖчҪЪөгПВҙҙҪЁөДөЪТ»ІгҪЪөг¶јКЗLopҪЪөг,/stageКЗmanagerҪЪөгЎЈН¬СщЈ¬LOP networkНшВзҪЪөгАаРНИЎҫцУЪЛьөДёёҪЪөгЎЈ 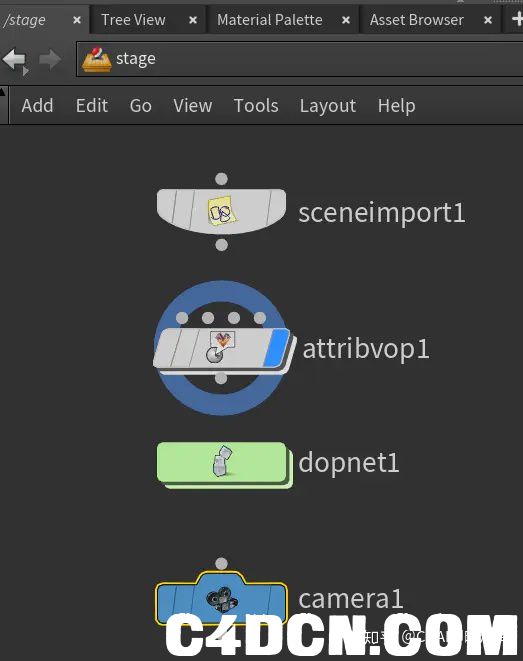 <hou.NodeType for Lop sceneimport> sceneimport <hou.NodeType for Lop attribvop> attribvop <hou.NodeType for Lop dopnet> dopnet <hou.NodeType for Lop camera> camera 12.ShopІДЦКshaderҪЪөгЎЈТІКЗАъК·ТЕБфПВөДҪЪөгЈ¬ИзҪсөЧЧУіЙОӘБЛНвІҝдЦИҫЖчІејюөДІДЦКҙж·ЕёщҫЭөШЎЈЛщУР/shopУлShop networkНшВзИЭЖчҪЪөгПВҙҙҪЁөДөЪТ»ІгҪЪөг¶јКЗShopҪЪөгЎЈShop networkҪЪөгАаРНИЎҫцУЪЛьөДёёҪЪөгЎЈ  <hou.NodeType for Shop matnet> matnet <hou.ShopNodeType for Shop vopcvex> vopcvex <hou.ShopNodeType for Shop v_fluffy> v_fluffy <hou.ShopNodeType for Shop v_ambient> v_ambient 13.TopИООсБчҪЪөгЈ¬Houdini17.5РВФцөДЗҝә·№ҰДЬЈ¬PDGҫНКЗЖдЦШТӘәЛРД№ҰДЬЈ¬ДЬҪшРР¶аПЯіМЈ¬¶аұдБҝЕъБҝјЖЛгЈ¬ДЬ№»ИПОӘКЗЖҪРРУоЦж°ЙЎЈЛщУР/tasksУлTop networkПВҙҙҪЁөДөЪТ»ІгҪЪөг¶јКЗTopҪЪөгЎЈTop networkНшВзИЭЖчҪЪөгАаРНИЎҫцУЪЛьөДёёҪЪөгЎЈ 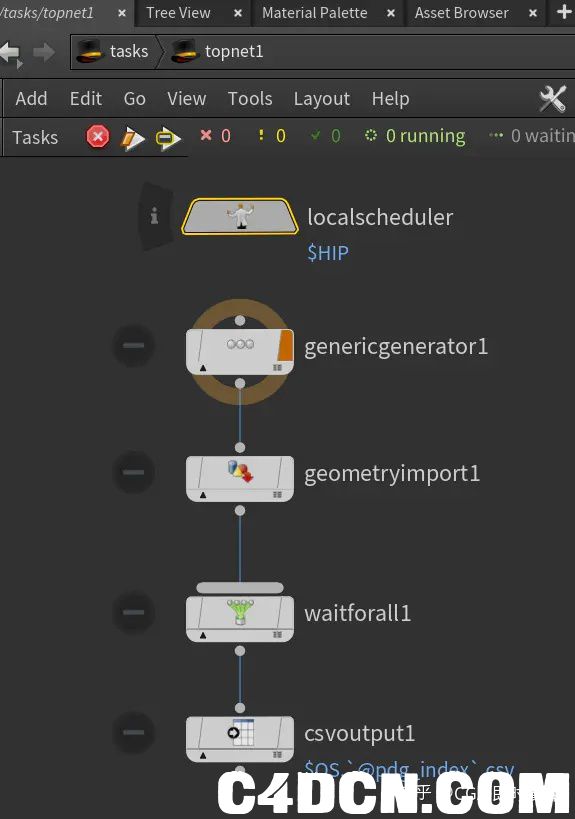 <hou.NodeType for Top localscheduler> localscheduler <hou.NodeType for Top genericgenerator> genericgenerator <hou.NodeType for Top geometryimport> geometryimport <hou.NodeType for Top waitforall> waitforall <hou.NodeType for Top csvoutput> csvoutput 14.TopNetФЪ/tasksАпҙҙҪЁөДTop networkНшВзИЭЖчҪЪөгЈ¬ТІКЗОЁЦрёцёцЎЈ  <hou.NodeType for TopNet topnet> topnet 15.VopNetАаРНХвТІКЗHoudiniАъК·ТЕБфПВөДНшВзИЭЖчҪЪөгЈ¬УГАҙјЖЛгvexөДҙҰЛщЈ¬ТІКЗҝЙКУ»ҜұаіМөДҙҰЛщЎЈЧўТвЈ¬ФЪVop networkАпҙҙҪЁөДЛщУРҪЪөг¶јКЗVopNetҪЪөгЈ¬І»КЗVopҪЪөгЎЈ 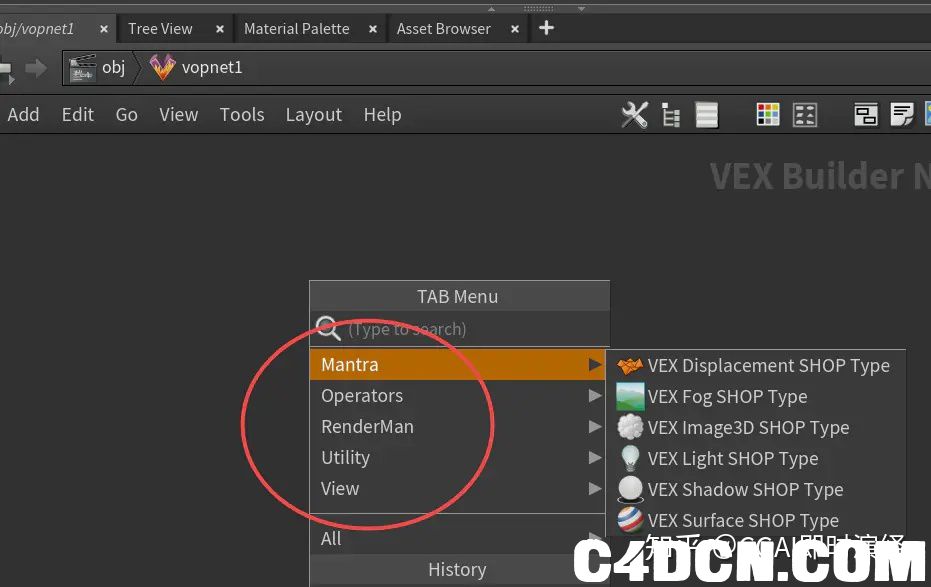 16.VopvexіМРтФЛРРҪЪөгЈ¬ХвАпөДVКЗvexөДТвЛјЈ¬vexКЗhoudiniұҫИЛИнјюөДУпСФЈ¬КЗ·ВЧЕC++өДСЛёо°жCЈ¬ОӘМбЙэИнјюјЖЛгР§ВКУГөДЎЈ№Щ·ҪРӯЦъТіАпЛөЛьКЗShader NodesХвТІКЗИГИЛГФ»уөДҙҰЛщЎЈТтОӘТФЗ°vexҫНКЗЦШТӘЦҙРРshaderөДЈ¬¶шИзҪсvexөД№ҰДЬТСҫӯұ»HoudiniНШХ№өҪБЛИ«ҫЦЎЈТІУРИЛ»б°СVАнҪвОӘviewөұЧцҝЙКУ»ҜұаіМАҙАнҪвЈ¬ЖдКөЛгКЗНбҙтХэЧЕ°ЙЈ¬ҫҝҫ№?Ҫб№ыHoudiniКЗОӘТХКхјТ¶шІ»КЗіМРтФұЙијЖөДТ»ҝоИнјюЈ¬ЖдҙуІҝГЕіМРт№ҰДЬИ·КөКЗДЬ№»НЁ№эҝЙКУ»ҜұаіМҪЪөгҪшРРКөПЦөДЈ¬ҫНПЦҪЧ¶О¶шСФЈ¬ТӘК¶ұрVopҪЪөгНЁ№эЕР¶ПЛьКЗІ»КЗҝЙКУ»ҜұаіМҪЪөгИ·КөКЗТ»ЦЦ·ЗіЈЦұІ»СЕ№ЫУЦЧјИ·өД·ЁЧУЎЈ 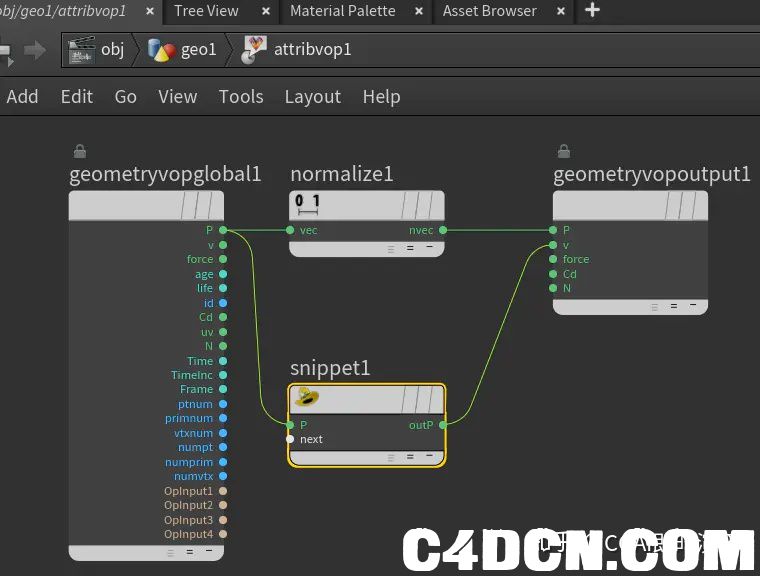 <hou.NodeType for Vop geometryvopglobal::2.0> geometryvopglobal::2.0 <hou.NodeType for Vop normalize> normalize <hou.NodeType for Vop geometryvopoutput> geometryvopoutput <hou.NodeType for Vop snippet> snippet өҪҙЛЈ¬Houdini18.5өДЛщУРҪЪөгАаРН¶јҪІНкБЛЎЈЛщТФЎ°ОӘәОROP networkУл/outТ»СщЈ¬/stageУлLOP networkТ»СщЎұЈ¬ХвАаУЙУЪHoudiniҪ«ҪЪөг№ҰДЬУлДЈҝй№ҰДЬ»мФЪТ»ЖрөД·зЙ§ГФ»уІЩЧцЈ¬ҙујТУҰёГАнҪвБЛ°ЙЎЈ »сИЎHoudiniөДёчАаҪЪөгЦӘөАHoudiniөДҪЪөгАаРНЈ¬КЗНжHoudiniөДөЧЧУЗ°МбЎЈHoudiniЧФјә»№КЗТ»ҝоУҰУГ¶«ОчИнјюЈ¬ОТГЗјИІ»ДЬОЮКУЛьөД№ҰДЬТІІ»ДЬЙс»ҜЛьөДҙжФЪЈ¬ЛьәНЖдЛыDCCИнјюЖдКөёъөзДФАпөДјЖЛгЖч»№УРКЦ»ъАпөДРЎіМРтТ»СщЈ¬РиТӘөДКұәтҫНУГЈ¬ДЬҙҰЦГТ»Р©ОКМвҫНДЬ№»БЛЈ¬ИПЗеДгПлТӘөДЈ¬ДгІЕІ»»бГФ»уЎЈ 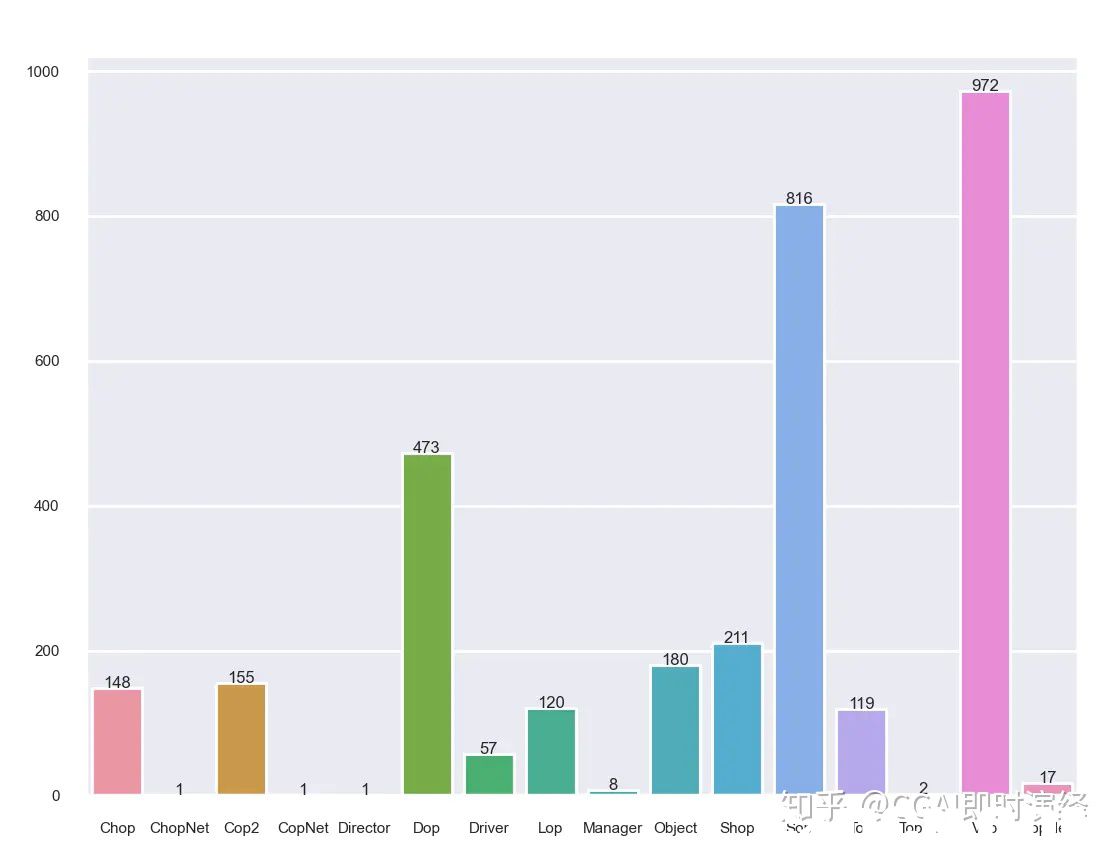 іЙ№ыДЬ№»ҝҙіцVopЧо¶аЈ¬SopЖдҙОЈ¬И»әуКЗDopЈ¬ХвИэёцХјБЛҫшҙуІҝГЕЎЈФхСщ»сИЎЛщУРҪЪөгДШЈҝ·ҪКҪИзПВ: import hounode_types=hou.nodeTypeCategories() #»сИЎҪЪөгёчАаРН all_nodes=[] counts={} for nc,nt in node_types.items(): all_types=nt.nodeTypes() #»сИЎёчҙуАаПВөДЛщУРҪЪөг(ЧЦөд) all_node_names=list(all_types.keys()) #ЛщУРҪЪөгГыіЖ counts[nc]=len(all_node_names) for name in all_node_names: all_nodes.append(name) print(counts) print(len(all_nodes)) РиТӘЧўТвөДКЗDirectorУлManagerҪЪөгАаРНОЮ·ЁНЁ№эnode.Types()Аҙ»сИЎ,Ль·ө»ШөДКЗҝХ{}Ј¬әЬЙсЖжЎЈ HoudiniҪЪөгІОКэ·ӯТлПИЙПёцР§№ыНј 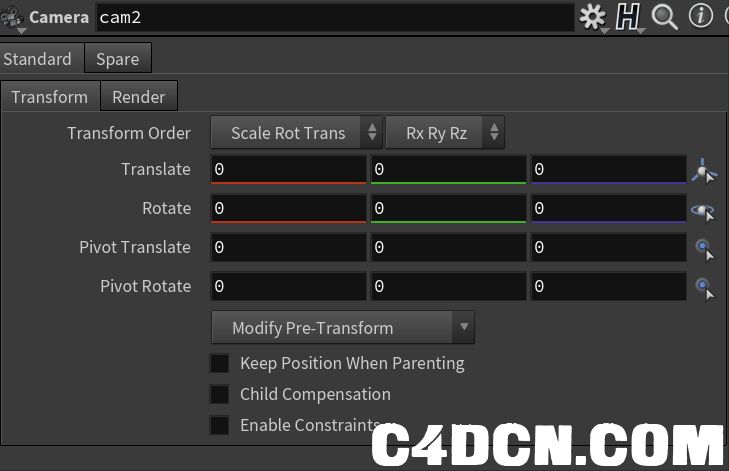
ЛјВ·КЗЈә ЛСјҜҪЪөгІОКэРЕПўget_data.pyimport numpy as npimport pandas as pd node_types=hou.nodeTypeCategories() #·ө»ШөДТ»ёцЧЦөд ''' {'Chop': <hou.NodeTypeCategory for Chop>, 'ChopNet': <hou.NodeTypeCategory for ChopNet>, 'Cop2': <hou.NodeTypeCategory for Cop2>, 'CopNet': <hou.Nod eTypeCategory for CopNet>, 'Director': <hou.NodeTypeCategory for Director>, 'Dop': <hou.NodeTypeCategory for Dop>, 'Driver': <hou.NodeTypeCategory f or Driver>, 'Lop': <hou.NodeTypeCategory for Lop>, 'Manager': <hou.NodeTypeCategory for Manager>, 'Object': <hou.NodeTypeCategory for Object>, 'Shop ': <hou.NodeTypeCategory for Shop>, 'Sop': <hou.NodeTypeCategory for Sop>, 'Top': <hou.NodeTypeCategory for Top>, 'TopNet': <hou.NodeTypeCategory fo r TopNet>, 'Vop': <hou.NodeTypeCategory for Vop>, 'VopNet': <hou.NodeTypeCategory for VopNet>} ''' all_nodes=[] #ЛщУРҪЪөгГыіЖ parm_names =[] data_list=[] for nc,nt in node_types.items(): #ncОӘCategoriesёчҙуАаГыіЖ,ntОӘёчҙуАаөДҪЕұҫАаРН node_types=nt.nodeTypes() #»сИЎёчҙуАаПВөДЛщУРҪЪөг(ЧЦөд) node_names=list(node_types.keys()) #ёГҪЪөгАаРНПВЛщУРҪЪөгГыіЖ for name in node_names: all_nodes.append(name) # јЗВјЛщУРҪЪөг node=hou.nodeType(nt,name) plg=node.parmTemplateGroup() f_parms=[p for p in plg.entries()] #»сИЎГҝёцЧоёЯІгј¶ІОКэ i_parms=[u for u in plg.entriesWithoutFolders()] #»сИЎ·ЗДҝВјІОКэ f_parms.extend(i_parms) parms=list(set(f_parms)) for i in parms: p_name =i.name() #ІОКэГыіЖ p_label=i.label() if i.label() else p_name #өұІ»ҙжФЪұкЗ©КұЈ¬ҫНУГІОКэГыіЖ if p_name not in parm_names: parm_names.append(p_name) per_list=[p_name,p_label,name,nc] data_list.append(per_list) print('all_nodes:',len(all_nodes)) print('parm_names:',len(parm_names)) data=np.array(data_list) df=pd.DataFrame(data,columns=['parm_name','parm_label','nodename','category']) save_path=os.path.join(hou.getenv('HIP'),'node_info.csv') df.to_csv(save_path) КдіцөДҪЪөгКэҫЭnode_info.csv №№ФмИзПВ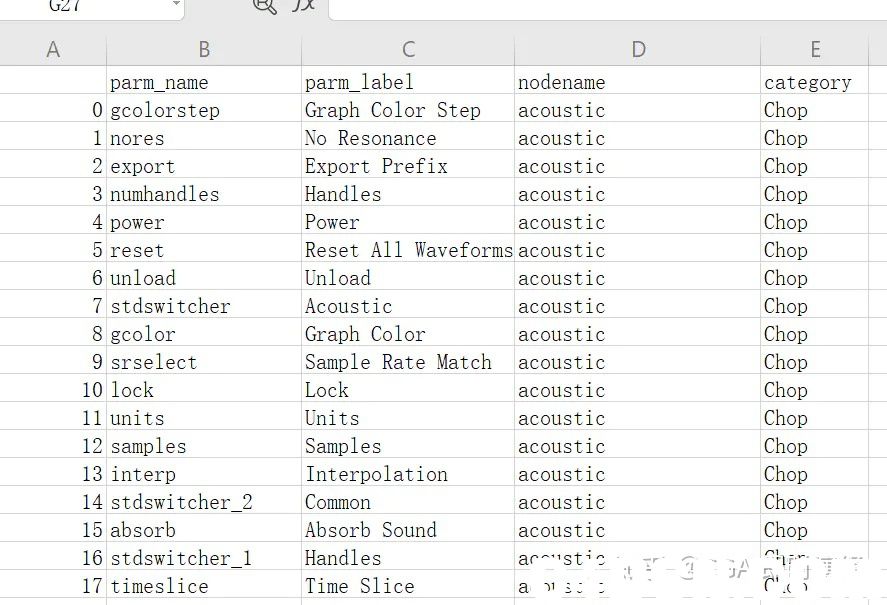 ҪЪөг·ӯТл translate_node.py
¶«ОчөШЦ·: Хвёц№ҰДЬЖдКөҫНКЗҪ«ҪЪөгЙПөДІОКэ·ӯТлТ»ұйЈ¬КөПЦТІІ»ДСЈ¬¶ФЦЖЧцУлСРҫҝөЧЧУЙПТІКІГҙУГЈ¬ОТЧцХвёцөДЦШТӘФӯТтКЗТтОӘОТТ»ЦұГ»УРХТөҪCGЧЁТөКхУпөДЦРОДУпБПЎЈHoudiniКЗТ»ёцҝЙҝШРФәЬЗҝөДDCCИнјюЈ¬јЩИзЦ»КЗХл¶ФЧЁТөИЛФұАҙІЩЧцЈ¬ДЗГҙЛщУРDCCИнјюУГЖдЧФјәөДУўУпКЗЧоәГөДЈ¬ө«Ј¬јЩЙиІ»КЗДШЈҝ»тХЯЛөјЩИзОТГЗТӘ¶ФDCCИнјюҪшРРНвІҝөДҪ»»ҘКҪІЩЧцЈ¬әГұИКЦКЖЎўЙщҝШЎўУпТфХвР©Ј¬ХвёцКұәтОТГЗ»б·ўПЦЈ¬»№өГРиТӘТ»МЧіЯ¶ИөДЧЁТөУпБПЈ¬І»И»өЧЧУҫНІ»әГК¶ұрГьБоЖуНјЎЈЛщТФОТ°СHoudini18.5АпөДЛщУРҪЪөгөДІОКэГыіЖТФј°ІОКэұкЗ©¶јөјіЙТ»ёцcsvЈ¬И»әуУГ°Щ¶И·ӯТлҪУҝЪ°СЛщУРұкЗ©»ъ·ӯОӘЦРОДЈ¬ҙжОӘТ»ёцҙуJsonТІ·ЕФЪgiteeАпЈ¬»ъ·ӯөДҝП¶ЁУРәЬ¶аІ»әПҙнОуЈ¬ОТВФОўРЮёДБЛјёёцЈ¬ёцИЛіМ¶ИУРПЮЈ¬»№ПЈНыУРРЛИӨөДЕуУСАҙТ»ЖрНкЙЖЎЈ№ю№юЈ¬јУУНЎЈ |
 /9
/9 











![[34G]і¬ҙуҙҙТвЙијЖҫ«Ж·C4D№ӨіМФҙОДјю](https://img.c4dcn.com/attachment/forum/threadcover/4b/5e/19413.jpg)